Allan deviation analysis#
Allan deviation analysis is a technique for quantifying the different
sources of error affecting IMU measurements. The
imutools.IMUBase class features methods to fit a model to
averaging times \(\tau\) and Allan deviation estimates \(\sigma\).
1# Set up
2import warnings
3import importlib.resources as rsrc
4import os.path as osp
5import numpy as np
6import xarray as xr
7import matplotlib.pyplot as plt
8import skdiveMove.imutools as imutools
9from scipy.optimize import OptimizeWarning
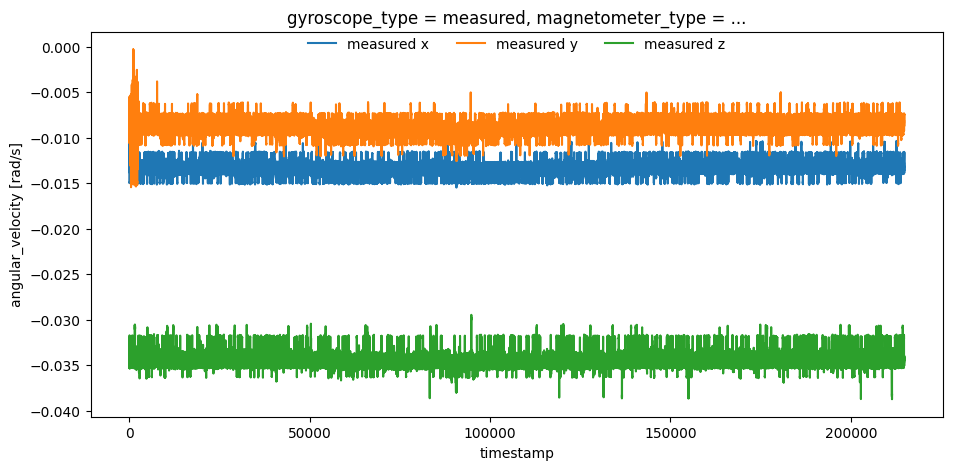
For demonstrating the methods available in the imutools.IMUBase
class, IMU measurements from an Android mobile phone were collected for 6
hours at 100 Hz frequency, but subsequently decimated to 10 Hz with a
forward/backward filter to avoid phase shift. The phone was kept immobile
on a table, facing up, for the data collection period. Note that two sets
of measurements for the magnetometer and gyroscope were recorded: output
and measured. The type of measurement and the sensor axis constitute a
multi-index, which provide significant advantages for indexing, so these
are rebuilt:
18icdf = (rsrc.files("skdiveMove") / "tests" /
19 "data" / "samsung_galaxy_s5.nc")
20s5ds = (xr.load_dataset(icdf) # rebuild MultiIndex
21 .set_index(gyroscope=["gyroscope_type", "gyroscope_axis"],
22 magnetometer=["magnetometer_type",
23 "magnetometer_axis"]))
24imu = imutools.IMUBase(s5ds.sel(gyroscope="measured", # use multi-index
25 magnetometer="measured"),
26 imu_filename=icdf)
Note that the data collected are uncorrected for bias. It is unclear whether Android’s raw (measured) sensor data have any other corrections or calibrations, but the assumption here is that none were performed.
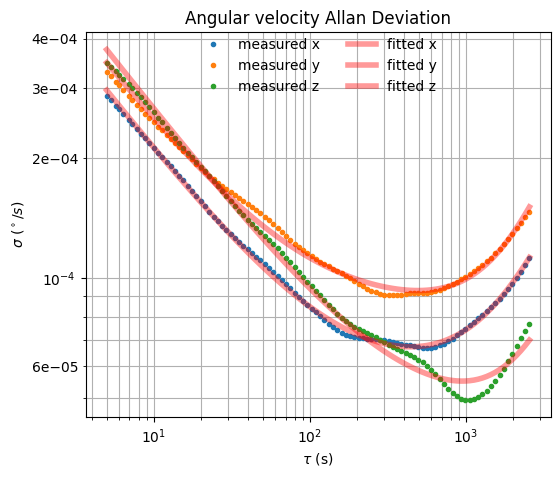
The first step of the analysis involves the calculation of \(\tau\) and \(\sigma\). The choice of \(\tau\) sequence is crucial.
32maxn = np.floor(np.log2(imu.angular_velocity.shape[0] / 250))
33taus = ((50.0 / imu.angular_velocity.attrs["sampling_rate"]) *
34 np.logspace(0, int(maxn), 100, base=2.0))
These can be used for fitting the ARMAV model and retrieve the coefficients for the five most common sources of variability (quantization, angle/velocity random walk, bias instability, rate random walk, and rate ramp).
35# Silence warning for inability to estimate parameter covariances, which
36# is not a concern as we are not making inferences
37with warnings.catch_warnings():
38 warnings.simplefilter("ignore", OptimizeWarning)
39 allan_coefs, adevs = imu.allan_coefs("angular_velocity", taus)
40
41print(allan_coefs)
angular_velocity_x angular_velocity_y angular_velocity_z
Q 1.008e-08 1.860e-08 5.619e-08
ARW 6.530e-04 7.559e-04 8.339e-04
BI 1.011e-04 1.400e-04 8.288e-05
RRW 1.966e-06 1.547e-10 7.758e-10
RR 4.434e-08 6.910e-08 2.854e-08
Feel free to download a copy of this demo
(demo_allan.py).