Inertial Measurement Unit time series#
Tools and classes for common IMU data processing tasks
The IMUBase represents tri-axial Inertial Measurement Unit (IMU)
data to study 3D kinematics. IMU devices are often deployed together with
time-depth recorders (TDR). The base class provides essential accessors
and other methods to perform error analysis and compute orientation using a
variety of algorithms, leveraging on the capabilities of Python package
AHRS.
Base class & methods summary#
|
Define IMU data source |
|
Instantiate object by loading Dataset from NetCDF file |
|
Estimate Allan deviation coefficients for each error type |
|
Compute the orientation of IMU tri-axial signals |
|
Calculate position assuming orientation is already known |
Instrument frame to body frame transformations#
One of the first tasks in analysis of IMU data from devices mounted on wild
animals is estimating the orientation of the instrument on the animal. The
IMU2Body class facilitates this process for devices mounted on
air-breathing marine/aquatic animals that regularly come up to the surface
to breathe. See Johnson (2011) for details on the approach.
Notes
A right-handed coordinate system is assumed in the input IMU data.
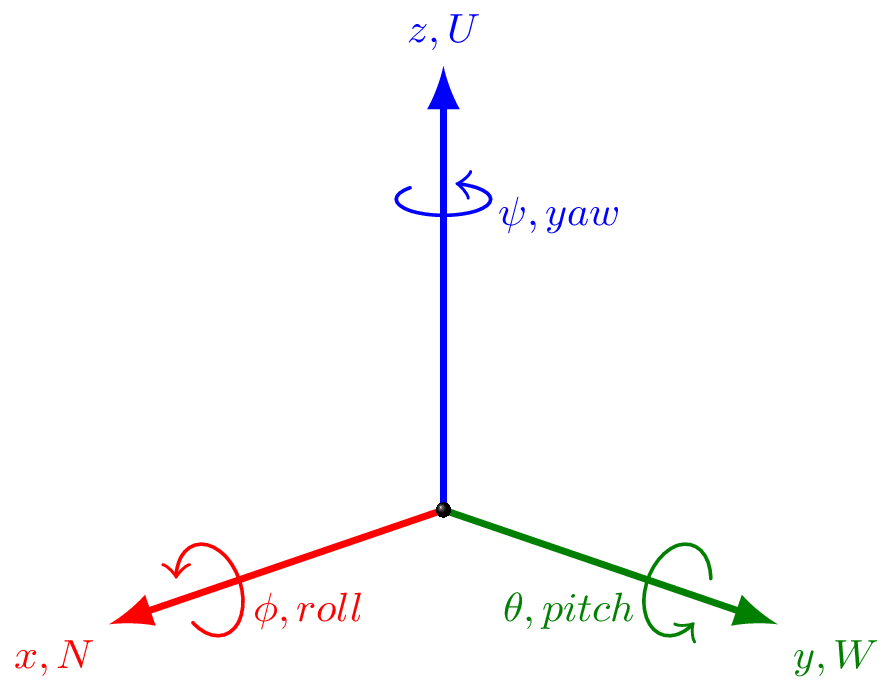
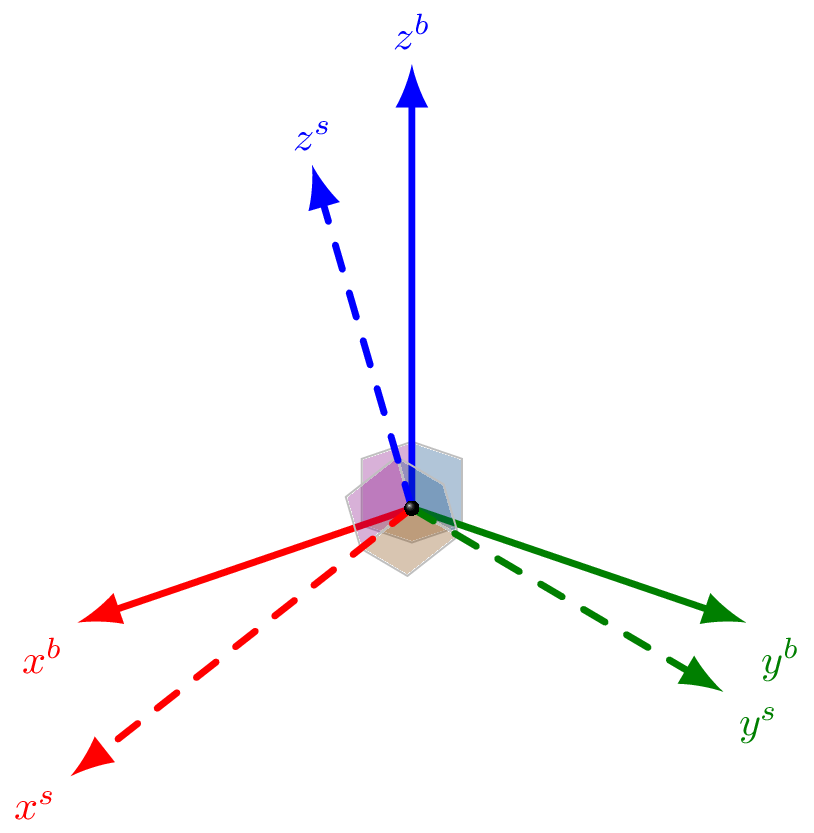
IMU2Body subclass extends IMUBase, providing an
integrated approach to estimating the relative orientation of two reference
frames: a) body (b) and b) sensor (s). It adds the methods summarized
below.
|
IMU coordinate frame transformation framework |
|
Create IMU2Body from NetCDF and CSV surface details files |
|
Subset vectors of given name from IMU object for given index |
|
Compute orientation for a given index in surface details table |
Obtain orientation for all periods in surface details table |
|
|
Apply orientation for a given index in surface details table |
|
Apply orientation to all periods in surface details table |
|
Apply orientations to the IMU object |
|
Filter records from surface_details and orientations |
|
Class plotting wrapper for module-level function |
|
Class plotting wrapper for module-level function |
Calibration and error analysis#
IMU measurements are generally affected by temperature, contain offsets and
are affected by the error characteristics of the sensors making the
measurements. These need to be taken into account and the
IMUcalibrate class provides a practical framework to do so.
|
Calibration framework for IMU measurements |
|
Build temperature models for experimental tri-axial IMU sensor signals |
|
Plot experimental IMU |
|
Plot IMU variable against temperature and fitted model |
|
Plot IMU measured and standardized variable along with temperature |
|
Retrieve linear model for a given IMU sensor axis signal |
|
Calculate signal ofset at given temperature from calibration model |
|
Apply fitted temperature compensation model to Dataset |
|
Fit a (non) rotated ellipsoid or sphere to 3D vector data |
|
Apply ellipsoid fit to vector array |
- class imutools.IMU2Body(surface_details, savgol_parms=None, **kwargs)[source]#
Bases:
IMUBaseIMU coordinate frame transformation framework
The framework is based on the analytical approach taken in TagTools (Matlab). However, the estimation of the IMU orientation uses the covariance matrix, rather than the unscaled correlation (outer product) of acceleration as the input for Singular Value Decomposition.
In addition to attributes in
IMUBase, IMU2Body adds the attributes listed below.- surface_details#
- Type:
- accel_sg#
Smoothed acceleration signals, if so requested. Otherwise, a pointer to the input acceleration signals.
- Type:
- orientations#
A summary table describing the orientation of the IMU relative to the body frame for each surface period.
- Type:
Examples
Construct IMU2Body from NetCDF file with IMU signals, and comma-separated file with timestamps for surface periods:
>>> import importlib.resources as rsrc >>> import skdiveMove.imutools as imutools >>> icdf = (rsrc.files("skdiveMove") / "tests" / "data" / "gertrude" / ... "gert_imu_frame.nc") >>> icsv = (rsrc.files("skdiveMove") / "tests" / "data" / "gertrude" / ... "gert_long_srfc.csv")
Apply Savitzky-Golay filter to acceleration to use as source data for Singular Value Decomposition. The required parameters for the filter are (in a tuple): 1) window length and 2) polynomial order, in that order.
>>> imu = imutools.IMU2Body.from_csv_nc(icsv, icdf, ... savgol_parms=(99, 2)) >>> print(imu) IMU -- Class IMU2Body object Source File ... IMU: <xarray.Dataset> ... Dimensions: ... Coordinates: * timestamp (timestamp) datetime64[ns] ... * accelerometer (accelerometer) <U1 12B 'x' 'y' 'z' * magnetometer (magnetometer) <U1 12B 'x' 'y' 'z' * gyroscope (gyroscope) <U1 12B 'x' 'y' 'z' Data variables: depth (timestamp) float64 ... acceleration (timestamp, accelerometer) float64 ... magnetic_density (timestamp, magnetometer) float64 ... angular_velocity (timestamp, gyroscope) float64 ... Attributes:... animal_id: Unknown animal_species_common: Humpback whale animal_species_name: Megaptera novaeangliae deployment_id: gert01 source_files: gertrude_2017.csv,... Surface segment duration summary: count 68 mean 0 days 00:02:01.764705882 std 0 days 00:02:15.182918382 min 0 days 00:00:11 25% 0 days 00:00:29.750000 50% 0 days 00:00:59 75% 0 days 00:02:26.250000 max 0 days 00:08:43 dtype: object
See IMU-frame to body-frame transformations demo for an extended example of typical usage of the methods in this class.
- describe_surfacing_durations()[source]#
Return a summary of surfacing durations
- Returns:
Summary description of durations
- Return type:
See also
- filter_surfacings(qual_thresh)[source]#
Filter records from surface_details and orientations
Remove records from the surface_details and orientations attributes, based on quality and, optionally, duration of the surface period. Records with quality higher than the specified value, and (optionally) duration lower than the specified number of seconds, are removed.
- Parameters:
qual_thresh (tuple) – Tuple with quality index and standard deviation of rolling motion during surface periods, in that order. Records with quality value higher, and standard deviation of rolling motion higher than these thresholds are removed.
See also
- classmethod from_csv_nc(surface_details_csv, imu_nc, endasc_col=0, beg_surface_col=5, end_surface_col=6, beg_next_desc_col=7, savgol_parms=None, load_dataset_kwargs={}, **kwargs)[source]#
Create IMU2Body from NetCDF and CSV surface details files
Utility function to facilitate reading and reshaping data files into and IMU2Body instance.
- Parameters:
surface_details_csv (str) – Path to CSV file with details of long surface intervals.
imu_nc (str) – Path to NetCDF file with IMU data.
endasc_col (int) – Index of the column with the timestamps identifying the end of ascent.
beg_surface_col (int) – Index of the column with the timestamps identifying the beginning of the surface interval.
end_surface_col (int) – Index of the column with the timestamps identifying the end of the surface interval.
beg_next_desc_col (int) – Index of the column with the timestamps identifying the beginning of the next interval.
savgol_parms (tuple, optional) – A 2-element tuple with the window length and polynomial order for the Savitzky-Golay filter (
savgol_filter()) to smooth acceleration.load_dataset_kwargs (dict, optional) – Dictionary of optional keyword arguments passed to
xarray.load_dataset().**kwargs – Optional keyword arguments passed to
IMUBase.__init__()method, except has_depth or imu_filename. The input Dataset is assumed to have a depth DataArray.
- Return type:
- get_orientation(surface_idx, plot=True, **kwargs)[source]#
Compute orientation for a given index in surface details table
The orientation is computed via Singular Value Decomposition (SVD), assuming that the chosen IMU data correspond to the animal close to the surface and moving with negligible pitching and rolling motions.
The function returns the rotation from the animal body frame to the IMU frame, along with the SVD matrices. Note that a right-handed coordinate system is assumed.
- Parameters:
surface_idx (datetime64) – Index in surface details table to be analyzed.
plot (bool, optional) – Whether to generate a plot of the estimate
**kwargs – Optional keyword arguments passed to
scatterIMU_svd(). Only title and animate are taken.
- Returns:
Rotation, (U, S, V) –
Rotationobject with potentially modified left singular vectors from Singular Value Decomposition (SVD), and full matrices from SVD (left singular vectors, sigma, and right singular vectors).- Return type:
Notes
The reference frame for the output
Rotationobject is defined by the centered acceleration vectors. All three components of this reference frame point in the positive direction of the centered data. Furthermore, this rotation is not identical to the left singular vectors because it has been flipped 180 degrees so that the rotated acceleration is negatively related to the depth gradient, as it should. Therefore, a copy of that basis was transformed by flipping the signs of these components so as to match the right-handed coordinate system assumed in the class.
- get_orientations()[source]#
Obtain orientation for all periods in surface details table
A quality index (\(q\)) for each estimate is calculated as:
\[q = \frac{s_{3}}{s_{2}}\]where the dividend and divisor are the singular values for the third and second singular vectors, respectively. A second indicator of the quality of the estimates is given as the standard deviation of the projection of the acceleration vector onto the second singular vector (i.e. pitching axis).
- Returns:
DataFrame indexed the by the rows of the surface details table, and having the following columns:
R: RotationSVD: SVD matricesquality: Tuple (quality index, std) for the estimatephi: Roll angle (degrees) from body to IMU frametheta: Pitch angle (degrees) from body to IMU framepsi: Yaw angle (degrees) from body to IMU frame
- Return type:
See also
- get_surface_vectors(surface_idx, name, smoothed_accel=False)[source]#
Subset vectors of given name from IMU object for given index
Return vectors of given name from IMU object for given index in surface details table.
- Parameters:
- Returns:
vectors
- Return type:
- orient_IMU(R_all=None)[source]#
Apply orientations to the IMU object
Use the rotations for each surface period segment to re-orient the IMU object to the animal frame. Alternatively, apply the supplied rotation to the entire IMU object.
An overview of the re-orientation process is illustrated below.

Each surface segment \(s_i\), delineated by beginning and ending times \(t_{0}^{s_i}\) and \(t_{1}^{s_i}\) (\(i=1\) to \(i=n\)), respectively, allows for an estimate of the IMU device orientation on the animal. The corresponding rotation \(R_{s_{i}}\) for transforming data from the IMU frame to the animal frame is applied to the data segments in the second line above, from the beginning of the deployment at \(t_0\) to the end at \(t_k\).
- Parameters:
R_all (Rotation, optional) – A
Rotationobject representing the rotation from the centered body frame to the IMU frame to be applied to the entire IMU object.- Returns:
Dataset with the re-oriented IMU object. If R_all was not provided, the Dataset contains an additional coordinate representing the surfacing period for each segment.
- Return type:
See also
- orient_surfacing(surface_idx, R_b2i)[source]#
Apply orientation for a given index in surface details table
Re-orient acceleration and magnetic density of IMU object relative to body frame, and return re-oriented IMU object. Note that the provided R_b2i must describe the rotation from the body frame to the IMU frame. The opposite rotation is applied to the acceleration and magnetic field vectors of the selected surface segment to orient the data in the body frame.
- Parameters:
surface_idx (datetime64) – Index in surface details table to be analyzed.
R_b2i (Rotation) –
Rotationobject representing the rotation from the body frame to the IMU frame.
- Returns:
The re-oriented IMU object.
- Return type:
See also
- orient_surfacings(R_all=None)[source]#
Apply orientation to all periods in surface details table
If the orientations attribute was filled, use it to build multi-index dataframe, othewise, fill it.
This method orients each segment independently, as opposed to a “smooth” transition between segments. Use
IMU2Body.orient_IMU()once satisfied with the results from individual segments to achieve a smooth adjustment of orientation across segments.- Parameters:
R_all (Rotation, optional) – A
Rotationobject representing the rotation from the centered body frame to the IMU frame to be applied to all surface periods. Default is to use the period-specific rotation.- Returns:
Dataset with the re-oriented surface IMU objects. If R_all was not provided, the Dataset contains an additional coordinate representing the surfacing period for each segment.
- Return type:
See also
- scatterIMU3D(surface_idx, vec_name, smoothed_accel=False, **kwargs)[source]#
Class plotting wrapper for module-level function
- Parameters:
surface_idx (datetime64) – Index in surface details table to be analyzed.
vec_name (str, {"acceleration", "magnetic_density"}) – Name of the vector array to subset.
smoothed_accel (bool, optional) – Whether to plot the smoothed acceleration (if vec_name=”acceleration”)
**kwargs – Optional keyword arguments passed to
scatterIMU3D().
- Returns:
Axes
- Return type:
See also
- tsplotIMU_depth(vec_name, surface_idx=None, smoothed_accel=False, **kwargs)[source]#
Class plotting wrapper for module-level function
Plot selected vector along with depth for the entire time series, and the edges of all surface segments overlaid on the depth panel. Alternatively, a specific surface segment can be plotted individually.
- Parameters:
vec_name (str, {"acceleration", "magnetic_density"}) – Name of the vector array to subset.
surface_idx (datetime64, optional) – Index in surface details table to be analyzed.
smoothed_accel (bool, optional) – Whether to plot the smoothed acceleration (if vec_name=”acceleration”)
**kwargs – Optional keyword arguments passed to
subplots()(e.g. figsize).
- Returns:
Array with
matplotlib.axes.Axesinstances.- Return type:
array_like
See also
- class imutools.IMUBase(dataset, acceleration_name='acceleration', angular_velocity_name='angular_velocity', magnetic_density_name='magnetic_density', time_name='timestamp', has_depth=False, depth_name='depth', imu_filename=None)[source]#
Bases:
objectDefine IMU data source
Use
xarray.Datasetto ensure pseudo-standard metadata.- imu#
Dataset with input data.
- Type:
- imu_var_names#
Names of the data variables with accelerometer, angular velocity, and magnetic density measurements.
- Type:
- quats#
Array of quaternions representing the orientation relative to the frame of the IMU object data. Note that the scalar component is last, following scipy’s convention.
- Type:
Examples
This example illustrates some of the issues encountered while reading data files in a real-world scenario. scikit-diveMove includes a NetCDF file with IMU signals collected using a Samsung Galaxy S5 mobile phone. Set up instance from NetCDF example data:
>>> import importlib.resources as rsrc >>> import xarray as xr >>> import skdiveMove.imutools as imutools >>> icdf = (rsrc.files("skdiveMove") / "tests" / "data" / ... "samsung_galaxy_s5.nc")
The angular velocity and magnetic density arrays have two sets of measurements: output and measured, which, along with the sensor axis designation, constitutes a multi-index. These multi-indices can be rebuilt prior to instantiating IMUBase, as they provide significant advantages for indexing later:
>>> s5ds = (xr.load_dataset(icdf) ... .set_index(gyroscope=["gyroscope_type", "gyroscope_axis"], ... magnetometer=["magnetometer_type", ... "magnetometer_axis"])) >>> imu = imutools.IMUBase(s5ds.sel(gyroscope="output", ... magnetometer="output"), ... imu_filename=icdf)
See Allan deviation analysis demo for an extended example of typical usage of the methods in this class.
- allan_coefs(sensor, taus)[source]#
Estimate Allan deviation coefficients for each error type
This procedure implements the autonomous regression method for Allan variance described in [1].
Given averaging intervals taus and corresponding Allan deviation adevs, compute the Allan deviation coefficient for each error type:
Quantization
(Angle, Velocity) Random Walk
Bias Instability
Rate Random Walk
Rate Ramp
- Parameters:
sensor (str) – Attribute name of the sensor of interest
taus ({float, str}) – Tau value, in seconds, for which to compute statistic. Can be one of “octave” or “decade” for automatic generation of the value.
- Returns:
coefs_all (pandas.DataFrame) – Allan deviation coefficient and corresponding averaging time for each sensor axis and error type.
adevs (pandas.DataFrame) –
MultiIndexDataFrame with Allan deviation, corresponding averaging time, and fitted ARMAV model estimates of the coefficients for each sensor axis and error type.
Notes
Currently uses a modified Allan deviation formula.
- compute_orientation(method='Madgwick', **kwargs)[source]#
Compute the orientation of IMU tri-axial signals
The method must be one of the following estimators implemented in Python module
ahrs.filters:AngularRate: Attitude from angular rateAQUA: Algebraic quaternion algorithmComplementary: Complementary filterDavenport: Davenport’s q-methodEKF: Extended Kalman filterFAAM: Fast accelerometer-magnetometer combinationFLAE: Fast linear attitude estimatorFourati: Fourati’s nonlinear attitude estimationFQA: Factored quaternion algorithmMadgwick: Madgwick orientation filterMahony: Mahony orientation filterOLEQ: Optimal linear estimator quaternionQUESTROLEQ: Recursive optimal linear estimator of quaternionSAAM: Super-fast attitude from accelerometer and magnetometerTilt: Attitude from gravity
The estimated quaternions are stored in the
quatsattribute.- Parameters:
method (str, optional) – Name of the filtering method to use.
**kwargs – Optional keyword arguments passed to filtering method.
- dead_reckon(g=9.80665, Wn=1.0, k=1.0)[source]#
Calculate position assuming orientation is already known
Integrate dynamic acceleration in the body frame to calculate velocity and position. If the IMU instance has a depth signal, it is used in the integration instead of acceleration in the vertical dimension.
- Parameters:
g (float, optional) – Assume gravity (\(m / s^2\)) is equal to this value. Default to standard gravity.
Wn (float, optional) – Cutoff frequency for second-order Butterworth lowpass filter.
k (float, optional) – Scalar to apply to scale lowpass-filtered dynamic acceleration. This scaling has the effect of making position estimates realistic for dead-reckoning tracking purposes.
- Returns:
vel, pos – Velocity and position 2D arrays.
- Return type:
- classmethod read_netcdf(imu_file, acceleration_name='acceleration', angular_velocity_name='angular_velocity', magnetic_density_name='magnetic_density', time_name='timestamp', has_depth=False, depth_name='depth', **kwargs)[source]#
Instantiate object by loading Dataset from NetCDF file
Provided all DataArrays in the NetCDF file have the same dimensions (N, 3), this is an efficient way to instantiate.
- Parameters:
imu_file (str) – As first argument for
xarray.load_dataset().acceleration_name (str, optional) – Name of the acceleration
DataArrayin theDataset.angular_velocity_name (str, optional) – Name of the angular velocity
DataArrayin theDataset.magnetic_density_name (str, optional) – Name of the magnetic density
DataArrayin theDataset.has_depth (bool, optional) – Whether input data include depth measurements.
depth_name (str, optional) – Name of the depth
DataArrayin theDataset.**kwargs – Optional keyword arguments passed to
xarray.load_dataset().
- Returns:
obj – Class matches the caller.
- Return type:
- property acceleration#
Return acceleration array
- Return type:
- property angular_velocity#
Return angular velocity array
- Return type:
- property depth#
Return depth array
- Return type:
- property magnetic_density#
Return magnetic_density array
- Return type:
- property sampling_interval#
Return sampling interval
Assuming all DataArray`s have the same interval, the sampling interval is retrieved from the acceleration `DataArray.
- Return type:
Warning
The sampling rate is retrieved from the attribute named sampling_rate in the NetCDF file, which is assumed to be in Hz units.
- class imutools.IMUcalibrate(x_calib, periods, axis_order=['x', 'y', 'z'], **kwargs)[source]#
Bases:
IMUBaseCalibration framework for IMU measurements
Measurements from most IMU sensors are influenced by temperature, among other artifacts. The IMUcalibrate class implements the following procedure to remove the effects of temperature from IMU signals:
For each axis, fit a piecewise or simple linear regression of measured (lowpass-filtered) data against temperature.
Compute predicted signal from the model.
Select a reference temperature \(T_{\alpha}\) to standardize all measurements at.
The standardized measurement (\(x_\sigma\)) at \(T_{\alpha}\) is calculated as:
(1)#\[x_\sigma = x - (\hat{x} - \hat{x}_{\alpha})\]where \(\hat{x}\) is the value predicted from the model at the measured temperature, and \(\hat{x}_{\alpha}\) is the predicted value at \(T_{\alpha}\).
The models fit to signals from a motionless (i.e. experimental) IMU device in the first step can subsequently be used to remove or minimize temperature effects from an IMU device measuring motions of interest, provided the temperature is within the range observed in experiments.
In addition to attributes in
IMUBase, IMUcalibrate adds the attributes listed below.- periods#
List of slices with the beginning and ending timestamps defining periods in x_calib where valid calibration data are available. Periods are assumed to be ordered chronologically.
- Type:
- models_l#
List of dictionaries as long as there are periods, with each element corresponding to a sensor, in turn containing another dictionary with each element corresponding to each sensor axis.
- Type:
- axis_order#
List of characters specifying which axis
x,y, orzwas pointing in the same direction as gravity in each period in periods.- Type:
Examples
Construct IMUcalibrate from NetCDF file with samples of IMU signals and a list with begining and ending timestamps for experimental periods:
>>> import importlib.resources as rsrc >>> import skdiveMove.imutools as imutools >>> icdf = (rsrc.files("skdiveMove") / "tests" / "data" / ... "cats_temperature_calib.nc") >>> pers = [slice("2021-09-20T09:00:00", "2021-09-21T10:33:00"), ... slice("2021-09-21T10:40:00", "2021-09-22T11:55:00"), ... slice("2021-09-22T12:14:00", "2021-09-23T11:19:00")] >>> imucal = (imutools.IMUcalibrate ... .read_netcdf(icdf, periods=pers, ... axis_order=list("zxy"), ... time_name="timestamp_utc")) >>> print(imucal) IMU -- Class IMUcalibrate object Source File None IMU: <xarray.Dataset> ... Dimensions: (timestamp_utc: 268081, axis: 3) Coordinates: * axis (axis) <U1 12B 'x' 'y' 'z' * timestamp_utc (timestamp_utc) datetime64[ns] ... Data variables: acceleration (timestamp_utc, axis) float64 ... angular_velocity (timestamp_utc, axis) float64 ... magnetic_density (timestamp_utc, axis) float64 ... depth (timestamp_utc) float64 ... temperature (timestamp_utc) float64 ... Attributes:... history: Resampled from 20 Hz to 1 Hz Periods: 0:['2021-09-20T09:00:00', '2021-09-21T10:33:00'] 1:['2021-09-21T10:40:00', '2021-09-22T11:55:00'] 2:['2021-09-22T12:14:00', '2021-09-23T11:19:00']
Plot signals from a given period:
>>> fig, axs, axs_temp = imucal.plot_experiment(0, var="acceleration")
Build temperature models for a given variable and chosen \(T_{\alpha}\), without low-pass filtering the input signals:
>>> fs = 1.0 >>> acc_cal = imucal.build_tmodels("acceleration", T_alpha=8, ... use_axis_order=True, ... win_len=int(2 * 60 * fs) - 1)
Plot model of IMU variable against temperature:
>>> fig, axs = imucal.plot_var_model("acceleration", ... use_axis_order=True)
Notes
This class redefines
IMUBase.read_netcdf().- apply_model(var, dataset, T_alpha=None, ref_vals=None, use_axis_order=True, model_idx=None)[source]#
Apply fitted temperature compensation model to Dataset
The selected models for tri-axial sensor data are applied to input Dataset, standardizing signals at \(T_{\alpha}\), optionally subtracting the offset at \(T_{\alpha}\).
- Parameters:
var (str) – Name of the variable with tri-axial data.
dataset (xarray.Dataset) – Dataset with temperature and tri-axial data from motionless IMU.
T_alpha (float, optional) – Reference temperature at which all measurements will be adjusted to. Default is the mean temperature in the input dataset.
ref_vals (list, optional) – Sequence of three floats with target values to compare against the signal from each sensor axis. If provided, the offset of each signal at \(T_{\alpha}\) is computed and subtracted from the temperature-standardized signal. The order should be the same as in the axis_order attribute if use_axis_order is True, or
x,y,zotherwise.use_axis_order (bool, optional) – Whether to use axis order from the instance. If True, retrieve model to apply using instance’s axis_order attribute. Otherwise, use the models defined by model_idx argument. Ignored if var is monoaxial.
model_idx (list or int, optional) – Sequence of three integers identifying the period (zero-based) from which to retrieve the models for
x,y, andzsensor axes, in that order. If var is monoaxial, an integer specifying the period for the model to use. Ignored if use_axis_order is True.
- Return type:
- build_tmodels(var, T_alpha=None, T_brk=None, use_axis_order=False, filter_sig=True, **kwargs)[source]#
Build temperature models for experimental tri-axial IMU sensor signals
Perform thermal compensation on motionless tri-axial IMU sensor data. A simple approach is used for the compensation:
For each axis, build a piecewise or simple linear regression of measured data against temperature. If a breakpoint is known, as per manufacturer specifications or experimentation, use piecewise regression.
Compute predicted signal from the model.
Select a reference temperature \(T_{\alpha}\) to standardize all measurements at.
The standardized measurement at \(T_{\alpha}\) is calculated as \(x - (\hat{x} - x_{T_{\alpha}})\), where \(\hat{x}\) is the value predicted from the model at the measured temperature, and \(x_{T_{\alpha}}\) is the predicted value at \(T_{\alpha}\).
- Parameters:
var (str) – Name of the variable in x with tri-axial data.
T_alpha (float, optional) – Reference temperature at which all measurements will be adjusted to. Defaults to the mean temperature for each period, rounded to the nearest integer.
T_brk (float, optional) – Temperature change point separating data to be fit differently. A piecewise regression model is fit. Default is a simple linear model is fit.
use_axis_order (bool, optional) – Whether to use axis order from the instance. If True, only one sensor axis per period is considered to have valid calibration data for the correction. Otherwise, all three axes for each period are used in the correction.
filter_sig (bool, optional) – Whether to filter in the measured signal for thermal correction. Default is to apply a Savitzky-Golay filter to the signal for characterizing the temperature relationship, and to calculate the standardized signal.
**kwargs – Optional keyword arguments passed to
savgol_filter()(e.g. win_len and polyorder).
- Returns:
List of tuples as long as there are periods, with tuple elements:
Dictionary with regression model objects for each sensor axis.
DataFrame with hierarchical column index with sensor axis label at the first level. The following columns are in the second level:
temperature
var_name
var_name_pred
var_name_temp_refC
var_name_adj
- Return type:
Notes
A new DataArray with signal standardized at \(T_{\alpha}\) is added to the instance Dataset. These signals correspond to the lowpass-filtered form of the input used to build the models.
See also
- get_offset(var, period, T_alpha, ref_val, axis=None)[source]#
Calculate signal ofset at given temperature from calibration model
- Parameters:
var (str) – Name of the variable to calculate offset for.
period (int) – Period (zero-based) containing calibration model to use.
T_alpha (float) – Temperature at which to compute offset.
ref_val (float) – Reference value for the chosen variable (e.g. gravity, for acceleration).
axis (str, optional) – Name of the sensor axis the signal comes from, if var is tri-axial; ignored otherwise.
- Return type:
Notes
For obtaining offset and gain of magnetometer signals, the ellipsoid method from the the
ellipsoidmodule yields far more accurate results, as it allows for the simultaneous three-dimensional estimation of the offset.
- plot_experiment(period_idx, var, units_label=None, **kwargs)[source]#
Plot experimental IMU
- Parameters:
period_idx (int) – Index of period to plot (zero-based).
var (str) – Name of the variable in with tri-axial data.
units_label (str, optional) – Label for the units of the chosen variable. Defaults to the “units_label” attribute available in the DataArray.
**kwargs – Optional keyword arguments passed to
subplots()(e.g. figsize).
- Returns:
See also
- plot_standardized(var, use_axis_order=True, units_label=None, ref_val=None, axs=None, **kwargs)[source]#
Plot IMU measured and standardized variable along with temperature
A multi-panel time series plot of the selected variable, measured and standardized, for all periods.
- Parameters:
var (str) – IMU variable to plot.
use_axis_order (bool, optional) – Whether to use axis order from the instance. If True, only one sensor axis per period is considered to have valid calibration data for the correction. Otherwise, all three axes for each period are used in the correction.
units_label (str, optional) – Label for the units of the chosen variable. Defaults to the “units_label” attribute available in the DataArray.
ref_val (float) – Reference value for the chosen variable (e.g. gravity, for acceleration). If provided, a horizontal line is included in the plot for reference.
axs (array_like, optional) – Array of Axes instances to plot in.
**kwargs – Optional keyword arguments passed to
subplots()(e.g. figsize).
- Returns:
See also
- plot_var_model(var, use_axis_order=True, units_label=None, axs=None, **kwargs)[source]#
Plot IMU variable against temperature and fitted model
A multi-panel plot of the selected variable against temperature from all periods.
- Parameters:
var (str) – IMU variable to plot.
use_axis_order (bool) – Whether to use axis order from the instance. If True, only one sensor axis per period is considered to have valid calibration data for the correction. Otherwise, all three axes for each period are used in the correction. Ignored for uniaxial variables.
units_label (str) – Label for the units of the chosen variable. Defaults to the “units_label” attribute available in the DataArray.
axs (array_like, optional) – Array of Axes instances to plot in.
**kwargs – Optional keyword arguments passed to
subplots()(e.g. figsize).
- Returns:
fig (matplotlib.Figure)
axs (array_like) – Array of
Axesinstances in fig with IMU signal plots.
See also
- classmethod read_netcdf(imu_nc, load_dataset_kwargs={}, **kwargs)[source]#
Create IMUcalibrate from NetCDF file and list of slices
This method redefines
IMUBase.read_netcdf().- Parameters:
imu_nc (str) – Path to NetCDF file.
load_dataset_kwargs (dict, optional) – Dictionary of optional keyword arguments passed to
xarray.load_dataset().**kwargs – Optional keyword arguments passed to
IMUcalibrate.__init__()method, except has_depth or imu_filename. The input Dataset is assumed to have a depth DataArray.
- Return type:
out
- savgol_filter(var, period_idx, win_len, polyorder=1)[source]#
Apply Savitzky-Golay filter on tri-axial IMU signals
- Parameters:
- Returns:
Array with filtered signals, with the same coordinates, dimensions, and updated attributes.
- Return type:
- imutools.apply_ellipsoid(vectors, offset, gain, rotM, ref_r)[source]#
Apply ellipsoid fit to vector array
- imutools.fit_ellipsoid(vectors, f='rxyz')[source]#
Fit a (non) rotated ellipsoid or sphere to 3D vector data
- Parameters:
vectors ((N,3) array) – Array of measured x, y, z vector components.
f (str) – String indicating the model to fit (one of ‘rxyz’, ‘xyz’, ‘xy’, ‘xz’, ‘yz’, or ‘sxyz’): rxyz : rotated ellipsoid (any axes) xyz : non-rotated ellipsoid xy : radius x=y xz : radius x=z yz : radius y=z sxyz : radius x=y=z sphere
- Returns:
otuple – Tuple with offset, gain, and rotation matrix, in that order.
- Return type:
- imutools.scatterIMU3D(vectors, col_vector, normalize=True, title=None, animate=True, animate_file=None, cbar_label=None, **kwargs)[source]#
3D plotting of vectors along with depth
Scatter plot of vectors, colored by depth.
- Parameters:
vectors (array_like, shape (N, 3) or (3,)) – Array with vectors to plot.
col_vector (array_like, shape (N,)) – The array to be used for coloring symbols.
normalize (bool, optional) – Whether to normalize vectors.
title (str, optional) – Title for the plot.
animate (bool, optional) – Whether to animate the plot.
animate_file (str) – Output file for the animation.
cbar_label (str, optional) – Title for the color bar.
**kwargs – Optional keyword arguments passed to
figure()(e.g. figsize).
- Return type:
- imutools.scatterIMU_svd(vectors, svd, R_ctr2i, normalize=False, center=False, title=None, animate=False, animate_file=None, **kwargs)[source]#
3D plotting of vectors and singular vector matrices
Plots a surface of the 2 top-most singular vectors computed from SVD overlaid on the scatter of vectors.
- Parameters:
vectors (array_like, shape (N, 3) or (3,)) – Array with vectors to plot.
svd (tuple) – The 3 arrays from Singular Value Decomposition (left singular vectors, sigma, right singular vectors).
R_ctr2i (Rotation) –
Rotationobject describing the rotation from the centered body frame to the IMU frame.normalize (bool, optional) – Whether to normalize vectors. Default assumes input is normalized.
center (bool, optional) – Whether to center vectors (i.e. subtract the mean). Default assumes input is centered.
title (str, optional) – Title for the plot.
animate (bool, optional) – Whether to animate the plot.
animate_file (str, optional) – Output file for the animation.
**kwargs – Optional keyword arguments passed to
figure()(e.g. figsize).
- Return type:
- imutools.tsplotIMU_depth(vectors, depth, time_name='timestamp', **kwargs)[source]#
Plot depth and each column of (N,3) array
- Parameters:
vectors (xarray.DataArray) – Array with columns to plot in subplot.
depth (xarray.DataArray) – Array with depth measurements.
**kwargs (optional keyword arguments) – Arguments passed to
subplots()(e.g. figsize).
- Returns:
Array with
matplotlib.axes.Axesinstances.- Return type:
array_like